K230摄像头跟随人脸实验
一、用到的配件:
1、二维云台1只:
云台主要部件:
舵机1:实现水平方向转动
舵机2:实现垂直方向转动
舵机原理和PWM请参考相关质料。
2、K230开发板:
主要使用了k230开发板的人脸识别和PWM功能。
二、舵机与k230之间的电线连接:

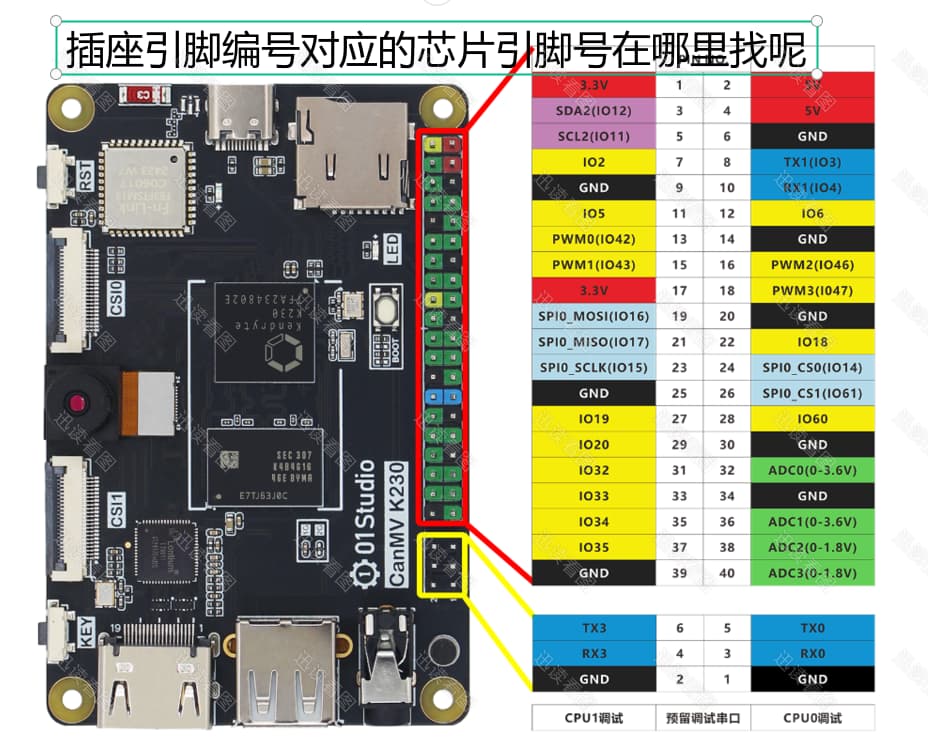
上图中PWM1(IO43)在开发板的插座中对应的脚位是15脚,接到舵机1的信号插口。舵机1的 v+接开发板的2脚,GND接开发板的6脚。
PWM1(IO47)在开发板的插座中对应的脚位是18脚,接到舵机2的信号插口。舵机2的 v+接开发板的4脚,GND接开发板的14脚。
k230代码编写思路:
在k230的人脸识别示例和PWM示例代码的基础上结合opencv中图像坐标的代码改写,根据人脸坐标的移动像素量控制舵机转动角度达到摄像头跟随的目的。
1、初始状态时舵机1和舵机2的角度为90度。
2、如果没识别到人脸时舵机1(水平反向)从10度向160度转动,每转动一个角度执行一次人脸识别。
3、如果还没识别到人脸时舵机1(水平反向)从160度向10度转动,每转动一个角度执行一次人脸识别。
4、如果还没识别到人脸时舵机2(垂直反向)从90度向60度转动,执行2和3的动作。
5、识别到人脸时舵机1和舵机2停止转动。
6、opencv请参考相关质料。
四、代码如下:
Face qensui-v1-ok.py
face_gensui-v1-ok.py (9.9 KB)